Safe Learning & Control
Safe reinforcement learning · Adaptive and optimal control

HKPFS Ph.D. Fellow @ PolyU
M.E. & B.E. @ XJTU
Safety · Control · Autonomy
Beginning in September 2026, I will join the Department of Aeronautical and Aviation Engineering at The Hong Kong Polytechnic University as an HKPFS Ph.D. Fellow, where I will be affiliated with the Research Centre for Low Altitude Economy (RCLAE).
I received both B.E. and M.E. degrees in Electrical Engineering from Xi’an Jiaotong University. At the BIR Lab, I worked with Prof. Hui Cao and Dr. Shuangsi Xue on safety-critical learning and control for autonomous systems.
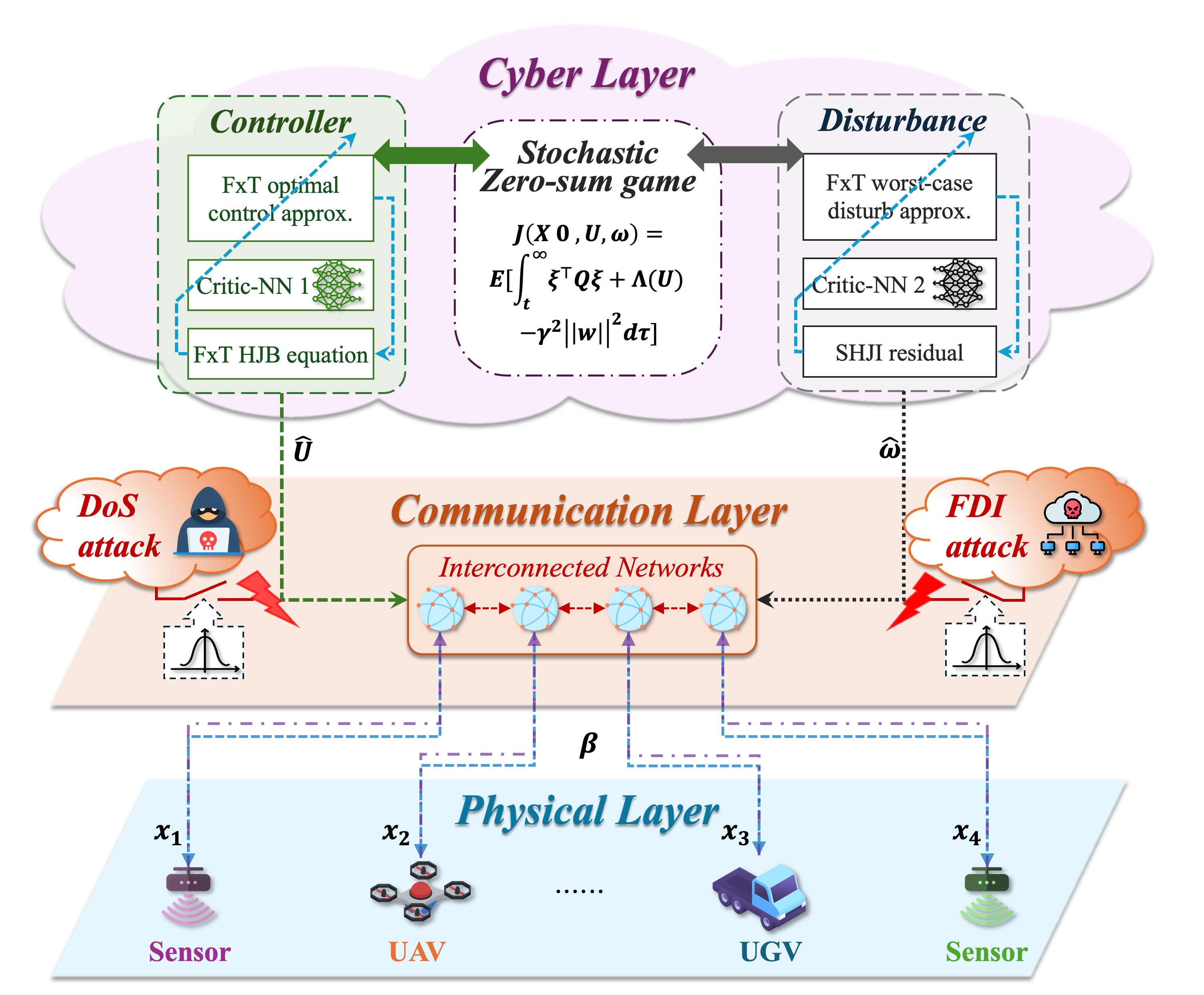
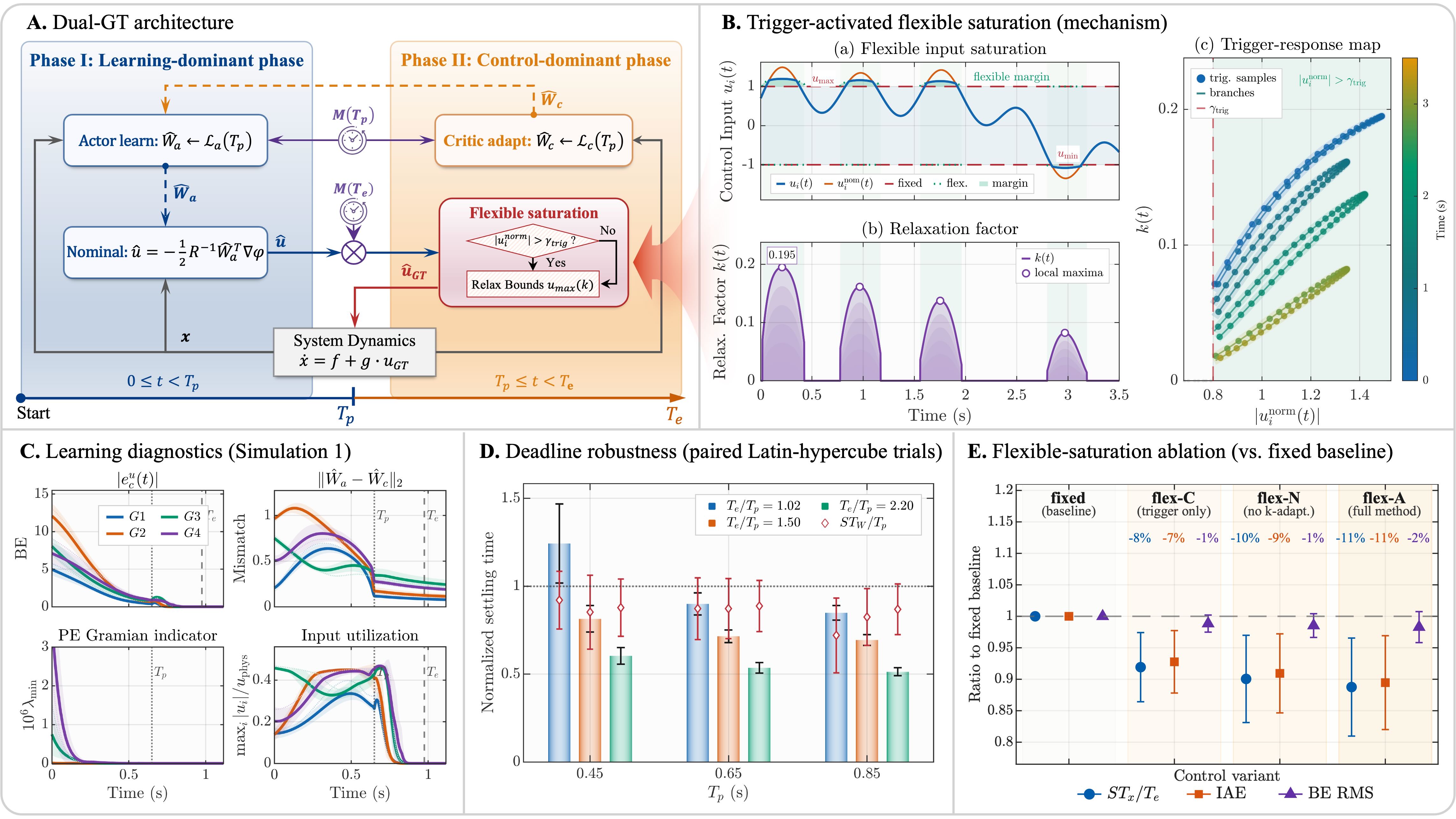
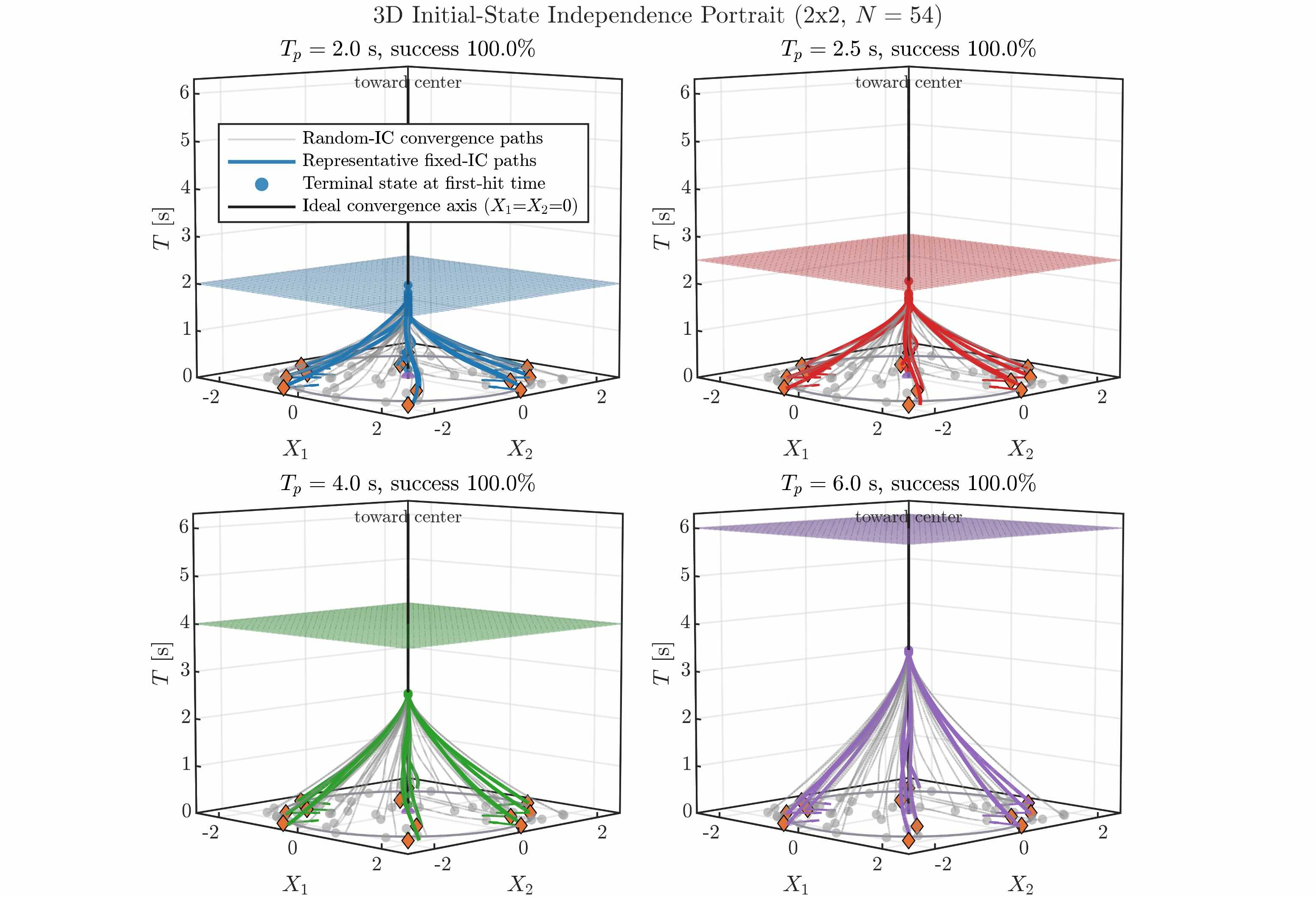
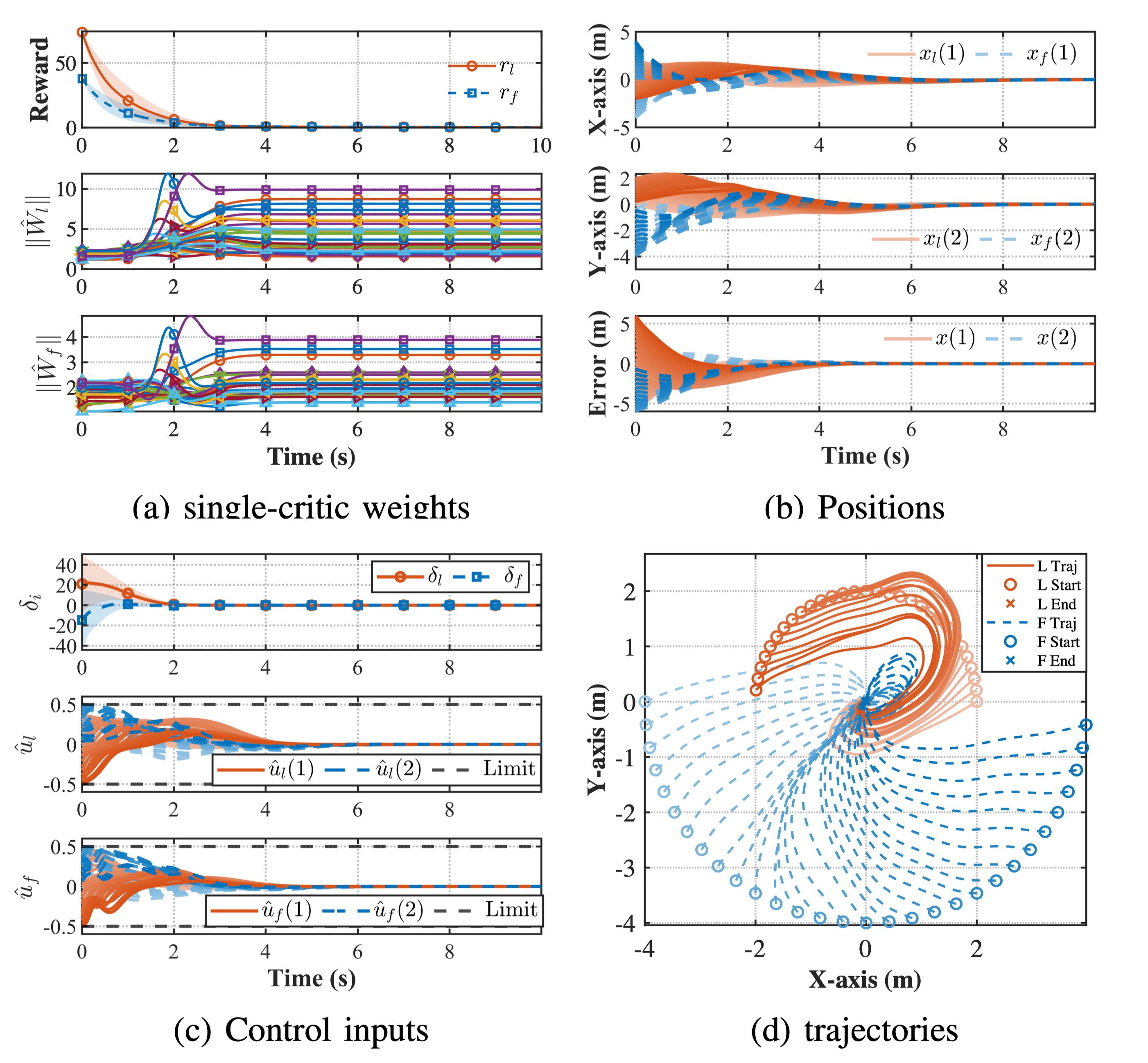
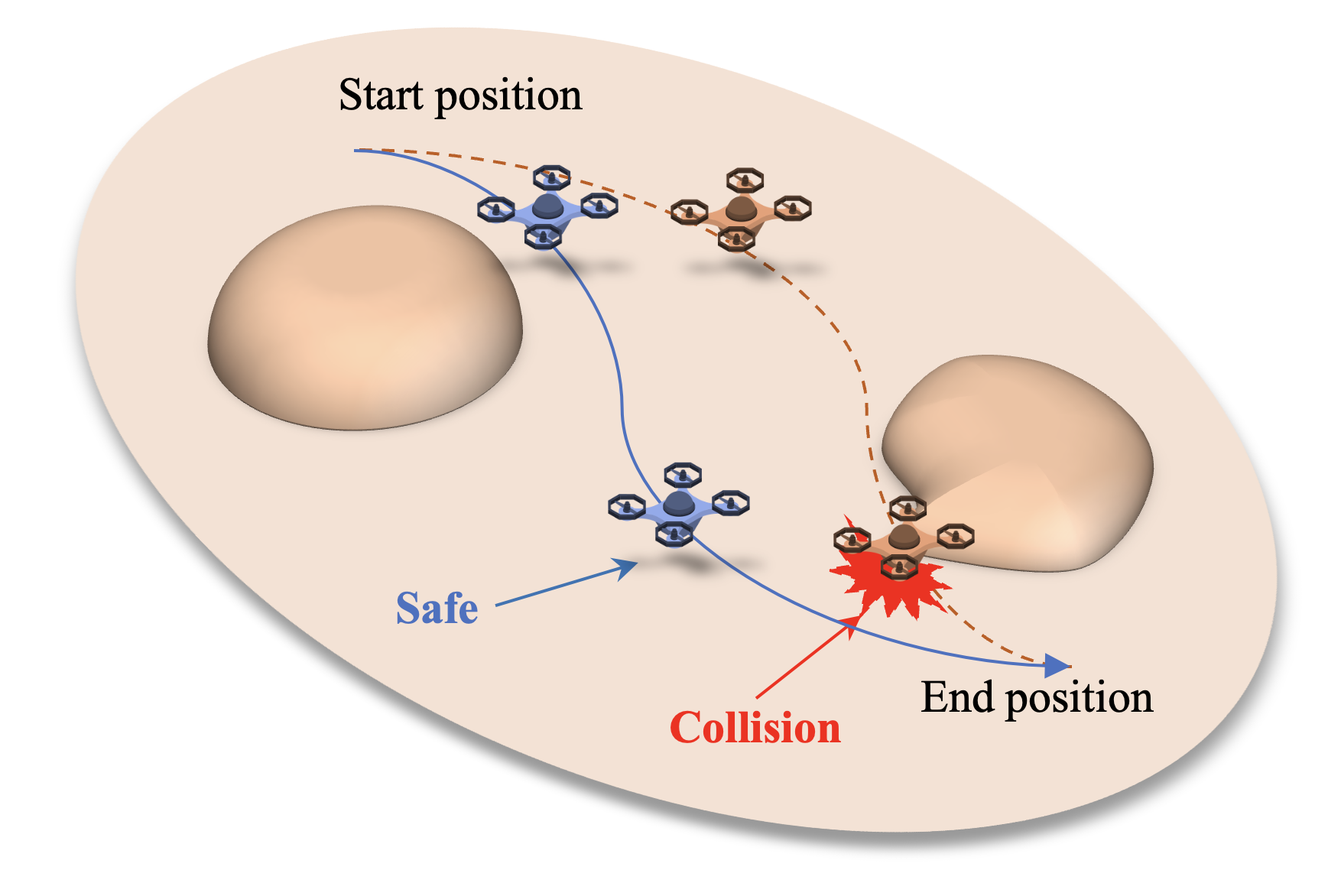
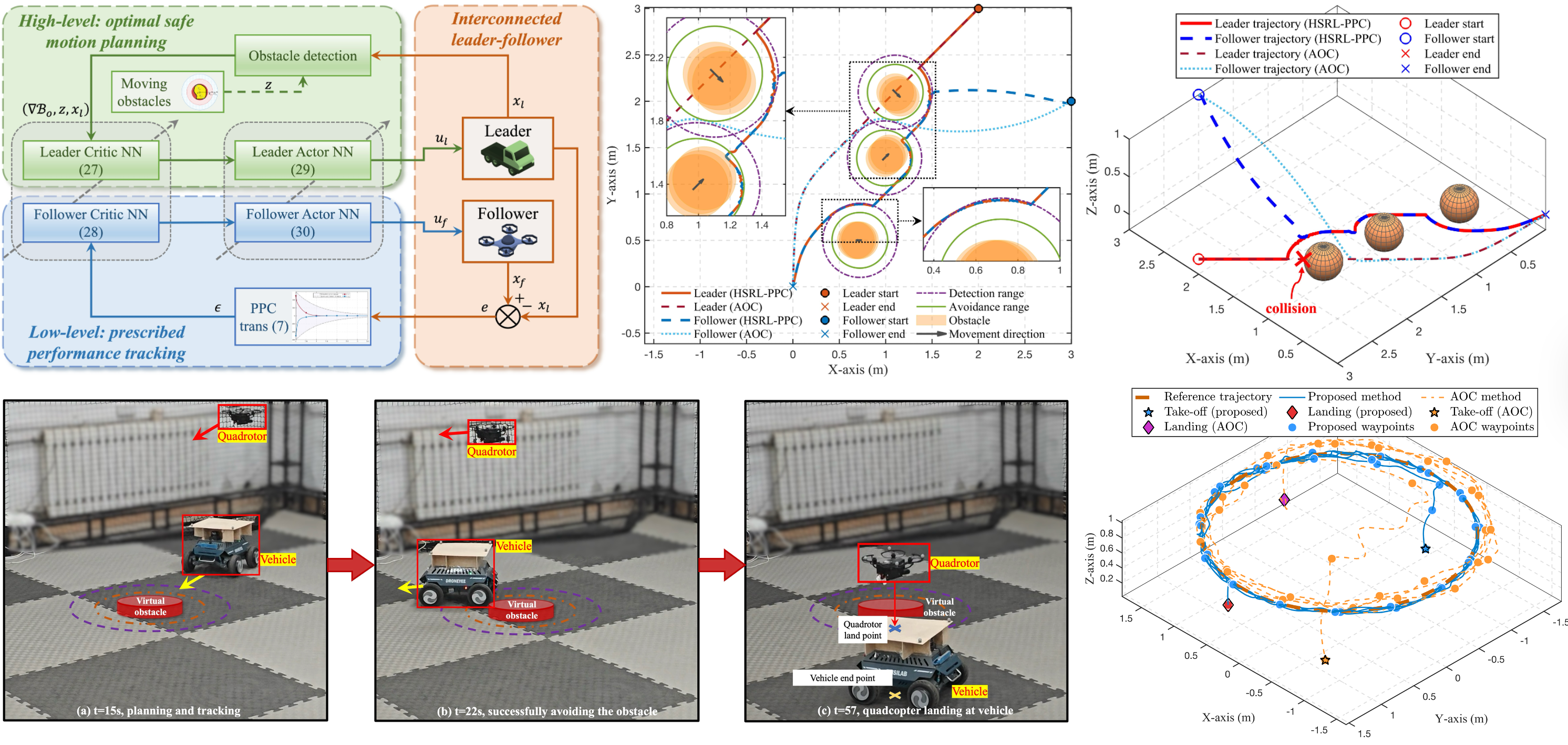
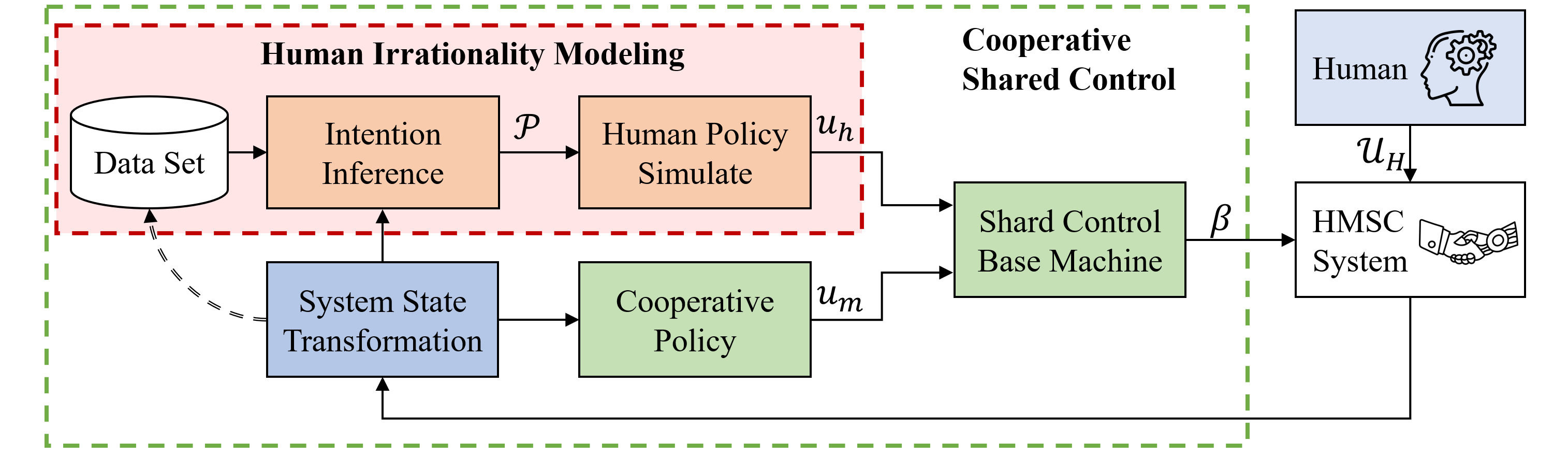
I develop safety-critical learning and control methods for autonomous systems operating under uncertainty and human interaction.
Safe reinforcement learning · Adaptive and optimal control
UAV–UGV coordination · Multi-agent control
Shared autonomy · Human-in-the-loop control
 IEEE TII
IEEE TII
 IEEE TSMC
IEEE TSMC
 IEEE TNNLS
IEEE TNNLS
 IEEE/CAA JAS
IEEE/CAA JAS
 IEEE TIE
IEEE TIE
 IEEE TASE
IEEE TASE
 IEEE TIE
IEEE TIE
 EAAI
EAAI
 Information Sciences
ESI Highly Cited
Information Sciences
ESI Highly Cited
 IEEE TASE
IEEE TASE
 Nonlinear Dynamics
ESI Highly Cited
Nonlinear Dynamics
ESI Highly Cited
 IJRNC
ESI Highly Cited
IJRNC
ESI Highly Cited
I serve as a reviewer for 200+ manuscripts across leading journals.
Top-tier Journals: Artificial Intelligence Review, IEEE T-SMC, IEEE T-AI, IEEE T-CAS:II, IEEE L-CSS, EJC, TR-B, TR-C, NN, APEN, CJA, OE.
Application-focused: IEEE T-ASE, CEP, EAAI, KBS, INS, ASOC, ESWA, Neuro.
General Journal: SCI-REP.
You can verify my review activities via my ORCID Profile.


Innovation Harbor, Building 3
Xi'an Jiaotong University
Xi'an, Shaanxi 710049, China
Powered by Jekyll and Minimal Light theme.