
Junkai Tan / 谭浚楷
About Me
I am a Master’s student at the EE, XJTU, where I also received my B.Eng. degree in 2023. I work at the BIR Lab under the supervision of Prof. Hui Cao and Dr. Shuangsi Xue, focusing on safe RL control for unmanned & autonomous systems I also spent time at PKU and SUSTech.
🔥 Recent Highlights
- [2026.02] Paper accepted by T-ASE.
- [2025.12] “Outstanding Report Award” at DUT Robotics & Intelligent Systems Academic Forum, Dalian, China. (link)
- [2025.11] “National Scholarship” & “Guodian Nanzi Special Scholarship”
- [2025.11] Papers accepted by EAAI, T-SMC, and T-AES.
- [2025.10] “Student Pacesetter” honor at XJTU (Top 15/30,000+). (link)
- [2025.10] “Excellent Report Award” at ZJU Swarm Intelligence Academic Forum, Hangzhou, China.
- [2025.07] Papers accepted by IEEE/CAA JAS (IF: 19.2) and IEEE T-IE.
Research Interests
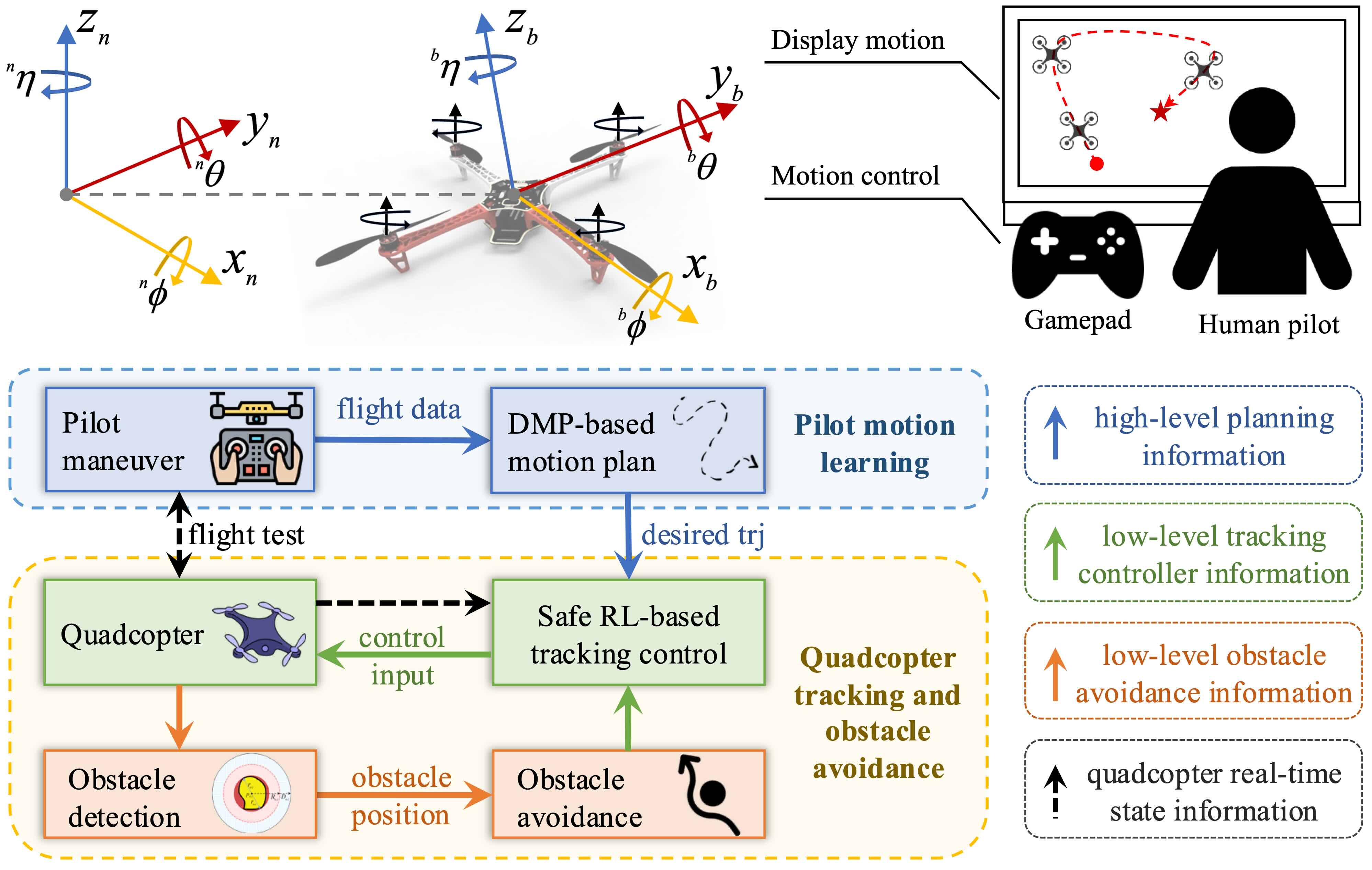
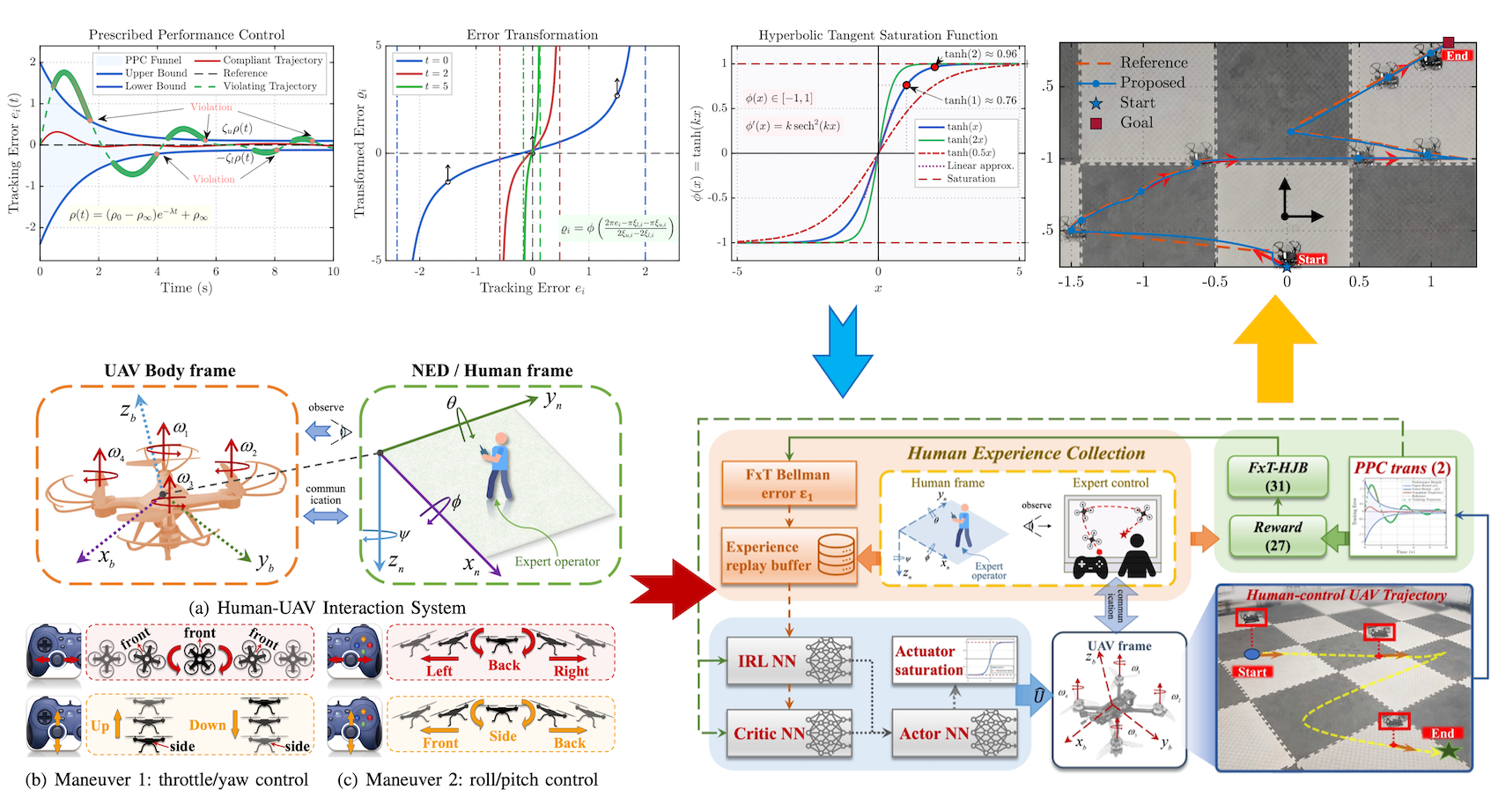
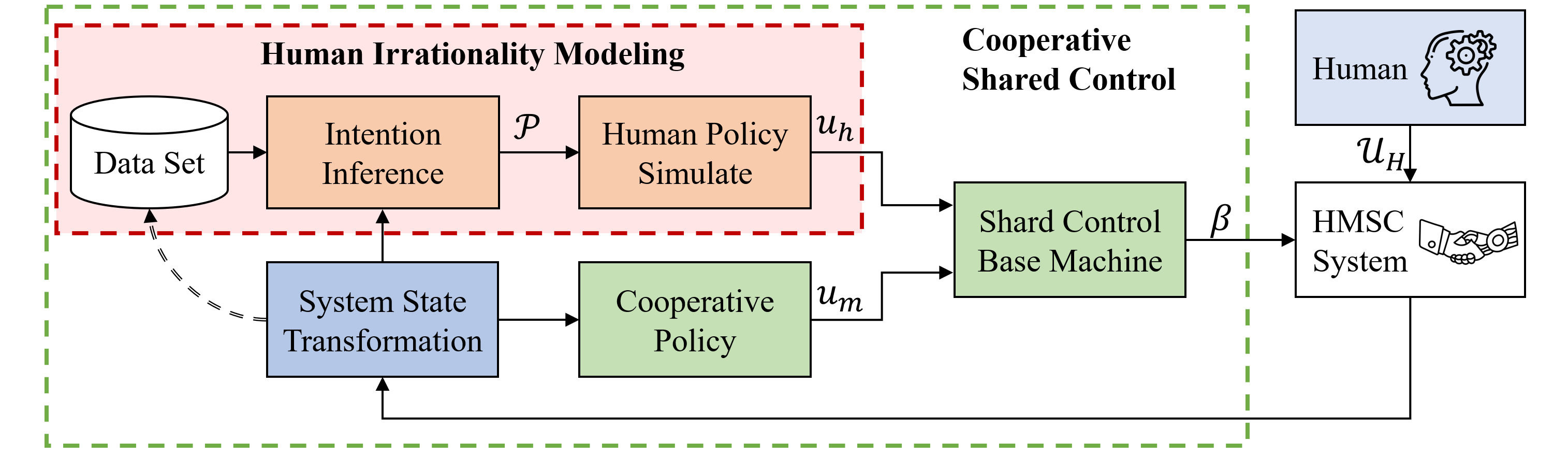
Research Mission: Enabling autonomous systems to learn and adapt safely in complex real-world environments through human–AI collaboration.
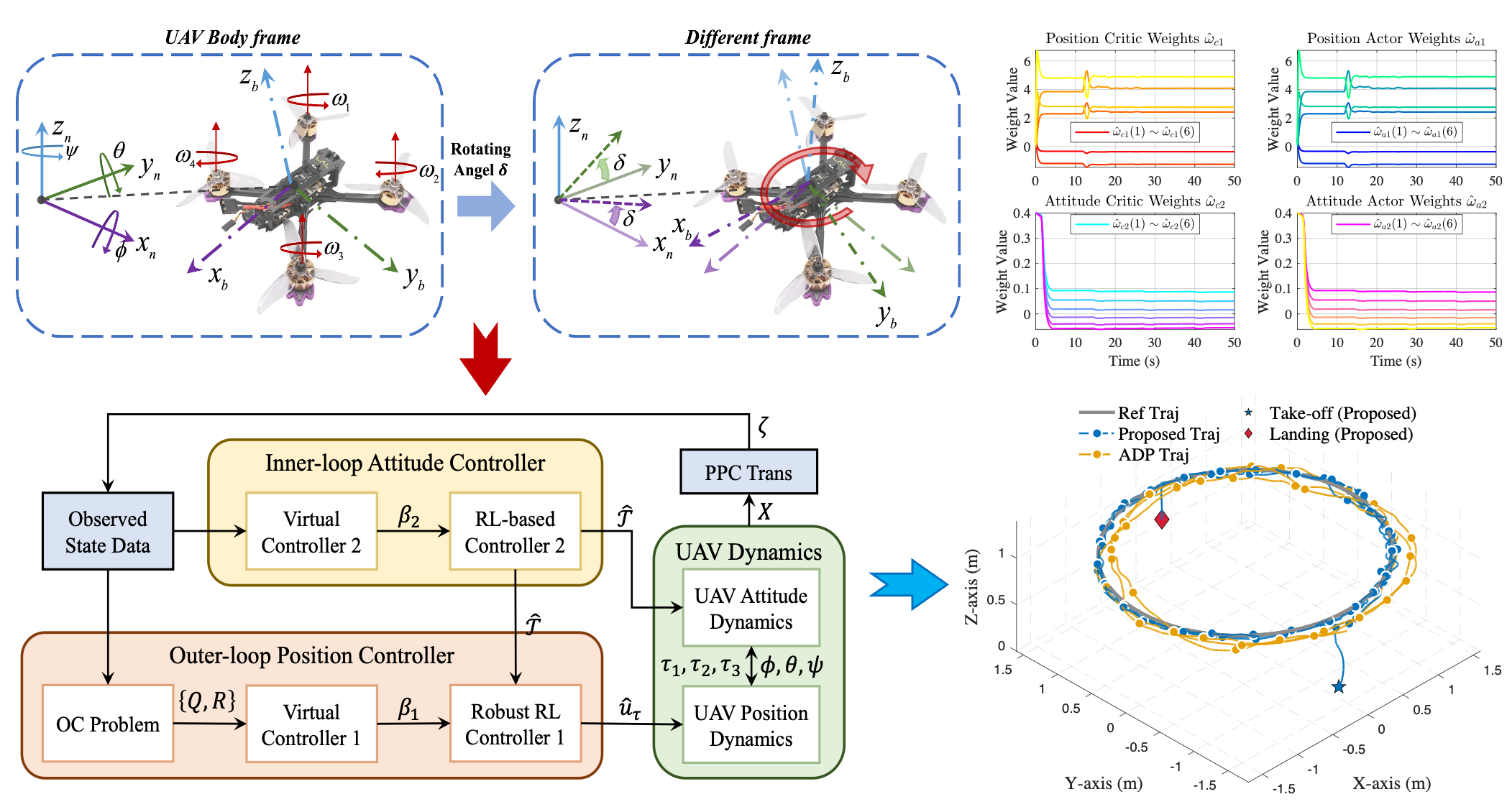
🤖 Unmanned Systems: Robotics control and UAV–UGV collaborative frameworks
🧠 Intelligent Control: Learning-based methods and reinforcement learning
🤝 Human–Machine Interaction: Shared autonomy and hybrid enhanced control systems
Selected Publications
2026
-
 EAAI
Engineering Applications of Artificial Intelligence, 2026
EAAI
Engineering Applications of Artificial Intelligence, 2026 -
 IEEE TASE
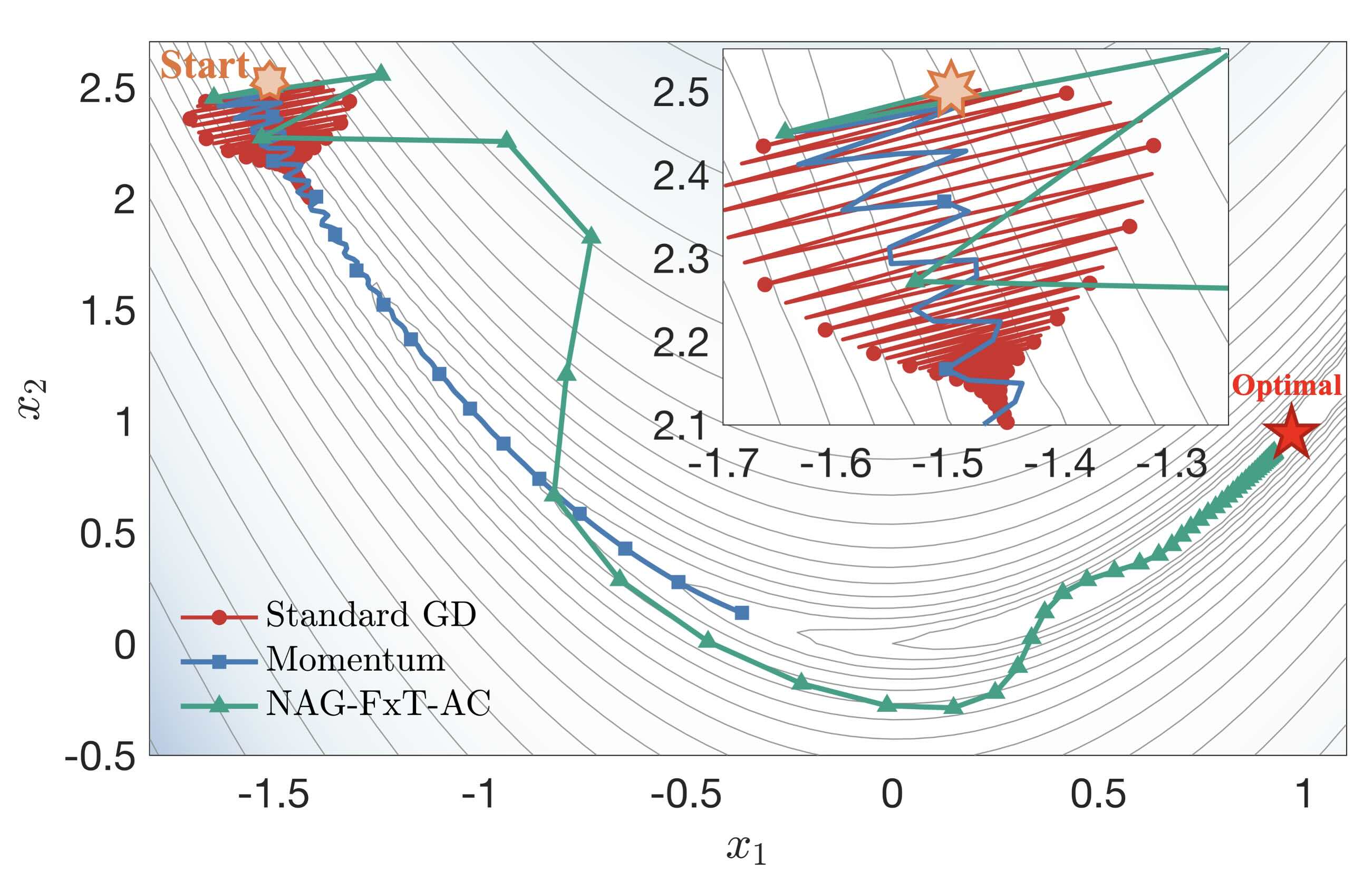
Nesterov accelerated gradient-based fixed-time convergent actor-critic control for nonlinear systemsIEEE Transactions on Automation Science and Engineering, 2026
IEEE TASE
Nesterov accelerated gradient-based fixed-time convergent actor-critic control for nonlinear systemsIEEE Transactions on Automation Science and Engineering, 2026
2025
-
 Information Sciences
ESI 1%
Information Sciences
ESI 1%
-
 Nonlinear Dynamics
ESI 1%
Nonlinear Dynamics, 2025
Nonlinear Dynamics
ESI 1%
Nonlinear Dynamics, 2025 -
 IEEE/CAA JAS
IEEE/CAA Journal of Automatica Sinica, 2025PDF Accepted
IEEE/CAA JAS
IEEE/CAA Journal of Automatica Sinica, 2025PDF Accepted -
 IEEE TIE
IEEE Transactions on Industrial Electronics, 2025
IEEE TIE
IEEE Transactions on Industrial Electronics, 2025 -
 IJRNC
ESI 1%
International Journal of Robust and Nonlinear Control, 2025
IJRNC
ESI 1%
International Journal of Robust and Nonlinear Control, 2025 -
 IEEE TIE
IEEE Transactions on Industrial Electronics, 2025
IEEE TIE
IEEE Transactions on Industrial Electronics, 2025 -
 IEEE TASE
ESI 1%
IEEE Transactions on Automation Science and Engineering, 2025
IEEE TASE
ESI 1%
IEEE Transactions on Automation Science and Engineering, 2025

Research Overview & System Framework
Professional Activities
Academic Service
- Session Chair, 2023 IEEE International Conference on Advanced Robotics and Mechatronics (ICARM).
Peer Review
I serve as a reviewer for 200+ manuscripts across leading journals.
-
Top-tier Journals: Artificial Intelligence Review, IEEE T-SMC, IEEE T-AI, IEEE L-CSS, TR-B, TR-C, NN, APEN, CJA, OE.
-
Application-focused: IEEE T-ASE, CEP, EAAI, KBS, INS, ASOC, ESWA, Neuro.
-
General Journal: SCI-REP.
View Full Journal List
- Artificial Intelligence Review (AIR)
- IEEE Transactions on Automation Science and Engineering (T-ASE)
- IEEE Transactions on Systems Man and Cybernetics: Systems (T-SMC)
- IEEE Transactions on Artificial Intelligence (T-AI)
- Transportation Research Part B: Methodological (TR-B)
- Transportation Research Part C: Emerging Technologies (TR-C)
- IEEE Control Systems Letters (L-CSS)
- Chinese Journal of Aeronautics (CJA)
- Neural Networks (NN)
- Knowledge-Based Systems (KBS)
- Engineering Applications of Artificial Intelligence (EAAI)
- Expert Systems with Applications (ESWA)
- Information Sciences (IS)
- Applied Energy (APEN)
- Applied Soft Computing (ASOC)
- Nonlinear dynamics (NODY)
- Ocean engineering (OE)
- Neurocomputing (Neuro)
- Journal of the Franklin Institute (JFI)
- Franklin Open (FO)
- Acta Astronautica (AA)
- Measurement (Meas)
- Scientific Reports (SCI-REP)
- IEEE Conference on Decision and Control (IEEE CDC)
You can verify my review activities via my ORCID Profile.
🎓 Education


📊 GitHub Stats
📍 Location
Currently located at: Innovation Harbor, Building 3, Xi’an Jiaotong University Xi’an, Shaanxi 710049, P.R. China
Powered by Jekyll and Minimal Light theme.